
Chapitre 11
Activité 2 - Activité expérimentale
90 min
Mobile et plan incliné
Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
Objectif : Déterminer expérimentalement et représenter les coordonnées des vecteurs position, vitesse et accélération en fonction du temps.
Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
Problématique de l'activité
Le skateboard est une discipline exigeante qui nécessite un bon équilibre et une certaine adresse. Les figures réalisées par certains skateurs suivent des trajectoires parfois complexes.
Quels renseignements sur la trajectoire peut-on tirer de la représentation
des vecteurs \bm{\vec{v}} et \bm{\vec{a}} ?
Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
Doc. 1Situation et modélisation expérimentale



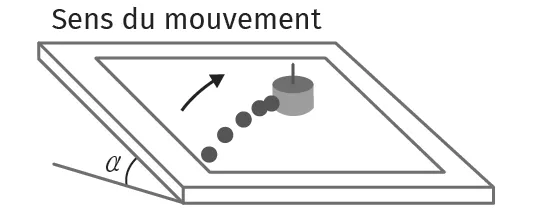
On se propose d'étudier le mouvement d'un skateur s'élançant sur la rampe d'un half-pipe. Pour cela, on modélise le phénomène à l'aide d'une table à coussin d'air inclinée d'un angle \alpha.
En considérant un plan incliné, l'accélération subie par le skateur vers le bas de la pente correspond à :
a = g \cdot \sin(\alpha)
Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
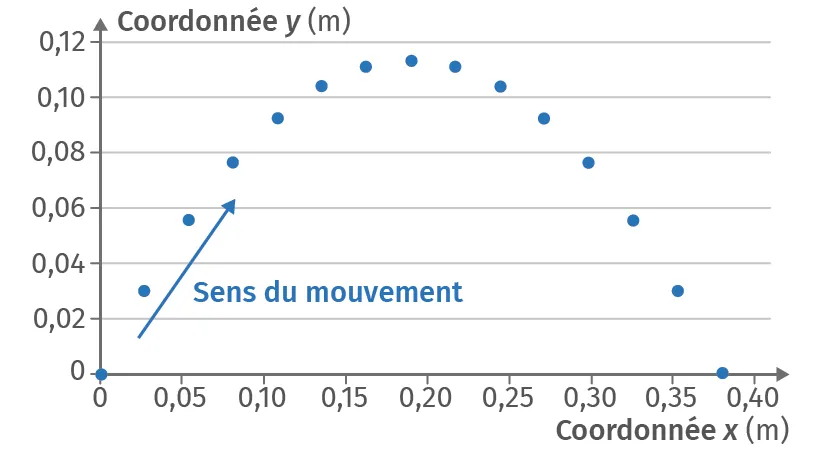
Doc. 2Trajectoire du mobile

Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
Doc. 3Approximation du vecteur accélération
Le vecteur accélération \vec{a}_\text{i} d'un système au point \text{M}_\text{i} entre deux dates t_{\text{i}-1} et t_{\text{i} + 1} a pour expression :
\vec{a} = \dfrac{\vec{v}_{\text{i}+1} - \vec{v}_{\text{i}-1}}{t_{\text{i}+1} - t_{\text{i}-1}}
Les vecteurs \vec{v}_{\text{i}-1} et \vec{v}_{\text{i}+1} étant tracés, on peut :
1) tracer le vecteur \Delta \vec{v}_\text{i} = \vec{v}_{\text{i}+1} - \vec{v}_{\text{i}-1} ;
2) mesurer à la règle la longueur de \Delta \vec{v}_\text{i} et en déduire la valeur en (m·s-1) du vecteur variation de vitesse grâce à l'échelle des vitesses ;
1) tracer le vecteur \Delta \vec{v}_\text{i} = \vec{v}_{\text{i}+1} - \vec{v}_{\text{i}-1} ;
2) mesurer à la règle la longueur de \Delta \vec{v}_\text{i} et en déduire la valeur en (m·s-1) du vecteur variation de vitesse grâce à l'échelle des vitesses ;
3) calculer la valeur du vecteur accélération :
\vec{a}_\text{i} = \dfrac{\Delta \vec{v}_\text{i}}{t_{\text{i}+1} - t_{\text{i}-1}} ;
4) tracer \Delta \vec{a}_\text{i} grâce à l'échelle des accélérations.
Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
- Échelle des distances : 1{,}0 cm ↔ 1{,}0 cm
- Échelle des vitesses : 1{,}0 cm ↔ 0{,}10 m·s-1
- Échelle des accélérations : 1{,}0 cm ↔ 0{,}50 m·s-2
- Durée entre deux points consécutifs : \tau = 40{,}0 ms
- Accélération de pesanteur : g = 9{,}81 m·s-2
Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
Téléchargez la et les de chaque point du mobile autoporteur.
Téléchargés le du mouvement.
Téléchargés le du mouvement.
Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
Questions
Compétence(s)
VAL : Exploiter un ensemble de mesures
VAL : Analyser des résultats
VAL : Analyser des résultats
1. Tracer les vecteurs \vec{v} et \vec{a} d'un point de la trajectoire lors de la phase ascendante et de la phase descendante. Préciser les caractéristiques de ces vecteurs. ➜ Fiche méthode
2. Déterminer la valeur a de l'accélération en effectuant une moyenne des deux mesures.
3. En déduire l'angle d'inclinaison \alpha.
Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
Synthèse de l'activité
Expliquer pourquoi \vec{a} est constant au cours du mouvement.
Une erreur sur la page ? Une idée à proposer ?
Nos manuels sont collaboratifs, n'hésitez pas à nous en faire part.
j'ai une idée !
Oups, une coquille
