
Chapitre 11
Exercices
Pour s'échauffer - Pour commencer
Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
Pour s'échauffer
Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
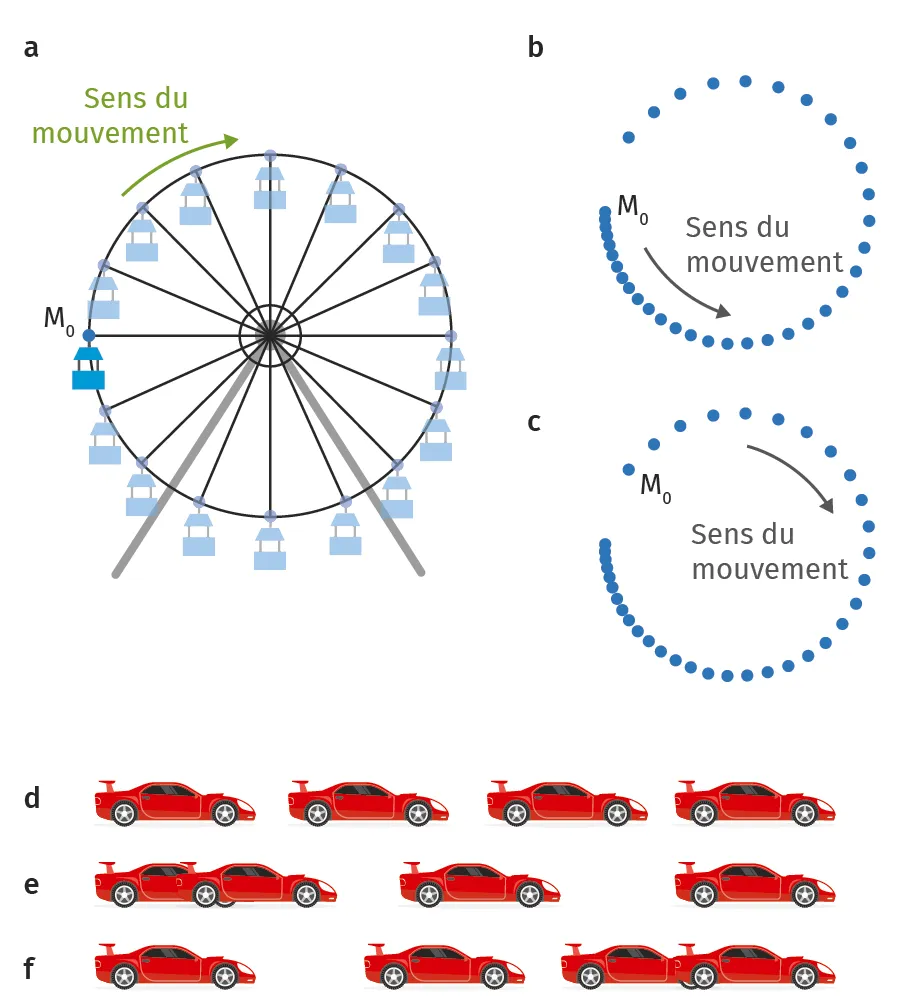
5Description d'un mouvement
Pour les chronophotographies ci-dessous, décrire le mouvement des systèmes dont les positions successives se succèdent à intervalle de temps régulier.

Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
6Accélération d'une voiture
Déterminer les accélérations moyennes des voitures suivantes.1. Une voiture de course passant de 0 à 100 km·h-1 en 3,0 s.
2. Une voiture subissant un choc durant 70 ms tel que \Delta v = 16 km·h-1.
3. Une voiture roulant à 30 km·h-1 subissant un arrêt brutal en un dixième de seconde.
4. Une voiture prenant un rond-point de 30 m de diamètre à 30 km·h‑1 (vitesse constante).
Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
7Nœud
Le nœud, noté (nd), est une unité de vitesse utilisée par les marins. Le record du monde de vitesse à la voile en kitesurf sur 500 m avoisine les 60 nd.
Convertir cette vitesse en (m·s-1), puis en (km·h-1).
Convertir cette vitesse en (m·s-1), puis en (km·h-1).
Données
- Conversion d'unité : 1 nd = 1 852 m·h-1


Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
Pour commencer
Vocabulaire
Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
8Vocabulaire adéquat
✔ APP : Maîtriser le vocabulaire du cours
Pour chacune des propositions suivantes, préciser si elles sont vraies ou fausses, puis corriger les propositions fausses.
a. Le vecteur vitesse \vec{v} est toujours tangent à la trajectoire.
b. Les vecteurs position \overrightarrow{\text{OM}} et vitesse \vec{v} ont toujours le même sens pour un mouvement rectiligne.
c. L'accélération est toujours nulle pour un mouvement rectiligne.
d. Un mouvement rectiligne admet un vecteur position \overrightarrow{\text{OM}} de sens contraire à celui de son accélération \vec{a}.
Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
9Mouvement circulaire
✔ APP : Maîtriser le vocabulaire du cours
Pour chacune des propositions suivantes, préciser si elles sont vraies ou fausses, puis corriger les propositions fausses.
a. Dans le repère de Frenet, \overrightarrow{N} est tangent à la trajectoire.
b. L'accélération \vec{a} est nulle pour les mouvements circulaires uniformes.
c. Le vecteur accélération est toujours centripète, c'est-à-dire orienté vers le centre de la trajectoire pour les mouvements circulaires.
d. Le vecteur accélération \vec{a} peut être centrifuge, sous certaines conditions, pour un mouvement circulaire.
Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
Caractérisation d'un mouvement
Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
10Bons adjectifs
✔ APP : Maîtriser le vocabulaire du cours
Décrire les mouvements dont les trajectoires sont représentées ci-dessous à l'aide d'un ou de plusieurs de ces qualificatifs :

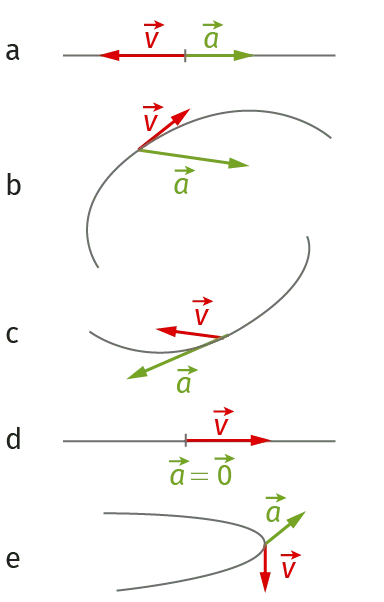
Mouvement a :
Mouvement b :
Mouvement c :
Mouvement d :
Mouvement e :
Mouvement b :
Mouvement c :
Mouvement d :
Mouvement e :
Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
11Représentation graphique
✔ VAL : Faire preuve d'esprit critique
1. Déterminer quels graphes correspondent aux évolutions de la position x(t), de la vitesse v(t) et de l'accélération a(t) d'un système ayant un mouvement rectiligne uniforme.

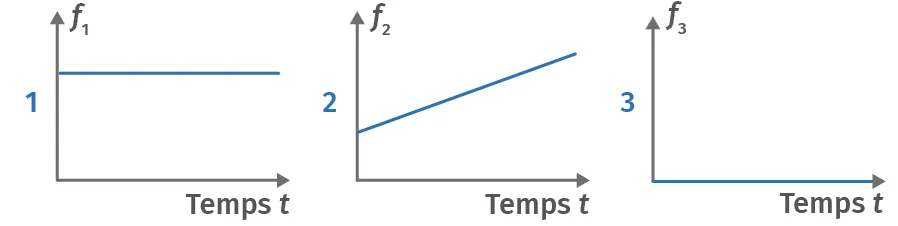
2. Préciser dans quel sens suivant l'axe (Ox) se déplace le système.
Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
12Route du Rhum
✔ APP : Maîtriser le vocabulaire du cours


L'orthodromie (route la plus courte formant un arc de cercle) reliant Saint‑Malo à Pointe‑à‑Pitre est dessinée ci-contre. Elle est de 3 452 M (le symbole M signifiant mille marin). En 2018, Francis Joyon bat le record de la traversée en 7 j 14 h 21 min et 47 s à la vitesse moyenne de 23,95 nd, le symbole (nd) signifiant nœud.
1. Parcourue à vitesse constante, décrire cette trajectoire dans le référentiel géocentrique.
2. Rechercher sur Internet la valeur d'un mile marin (M).
3. Préciser si le trajet suivi par le skipper est orthodromique.
Revivez la et découvrez la différence entre .
2. Rechercher sur Internet la valeur d'un mile marin (M).
3. Préciser si le trajet suivi par le skipper est orthodromique.
Revivez la et découvrez la différence entre .
Donnée
- Définition du nœud, noté (nd) : 1 nd = 1 852 m·h-1
Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
13Conditions initiales d'un mouvement
✔ REA/MATH : Utiliser des outils mathématiques
Les trois schémas ci-dessous représentent les conditions initiales de trois mouvements.

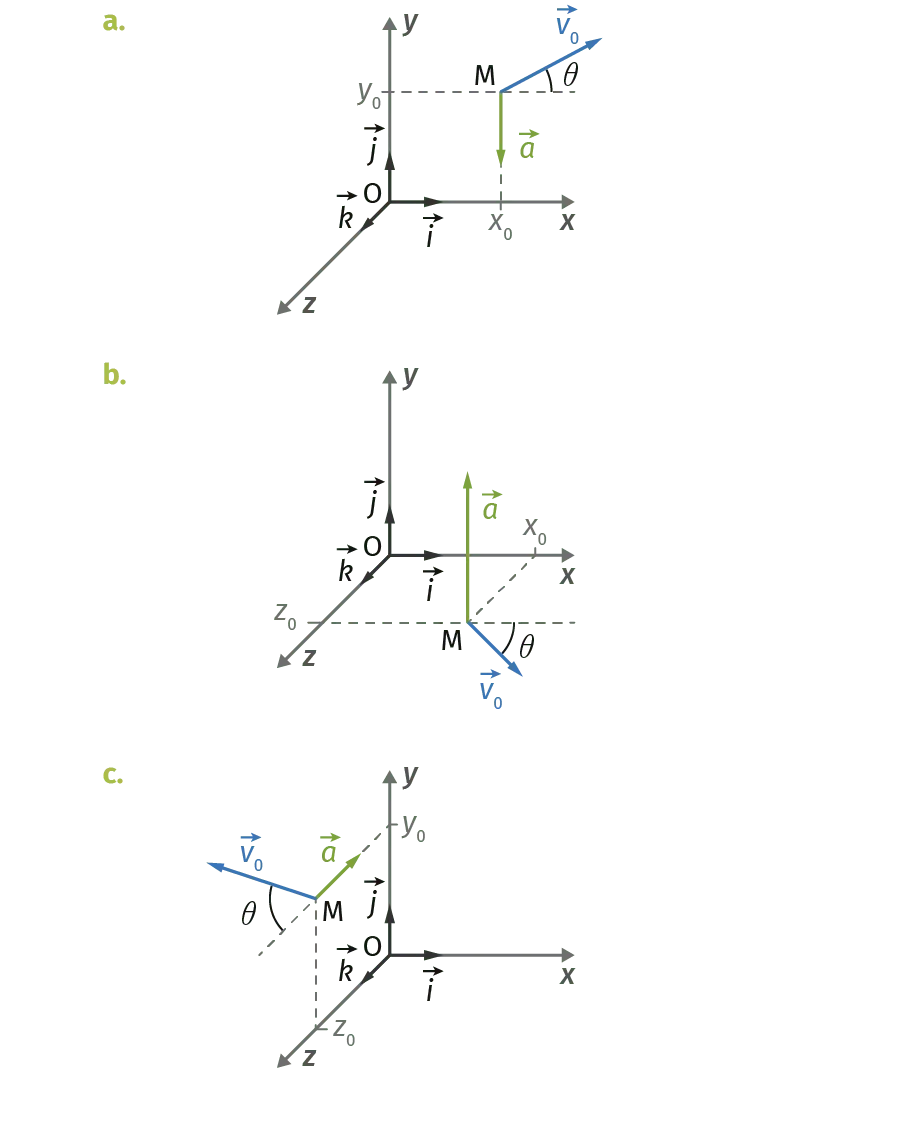
Déterminer les coordonnées des vecteurs vitesse initiale et accélération pour les trois situations représentées ci-dessus.
a.
b.
c.
a.
b.
c.
Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
14Aiguilles d'une horloge
✔ APP : Maîtriser le vocabulaire du cours
Une coccinelle se tient immobile sur l'aiguille des secondes d'une horloge. Cette aiguille mesure 20,0 cm.

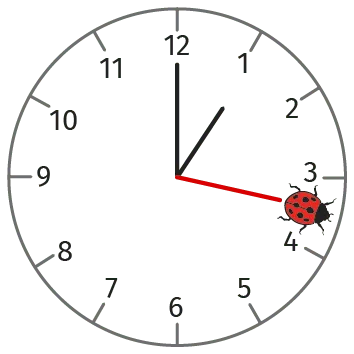
1. Préciser le référentiel dans lequel la coccinelle est immobile.
2. Donner la nature du mouvement de la coccinelle dans le référentiel de la pièce dans laquelle se trouve l'horloge.
3. Préciser les caractéristiques des vecteurs vitesse et accélération de la coccinelle dans le référentiel de la pièce.
2. Donner la nature du mouvement de la coccinelle dans le référentiel de la pièce dans laquelle se trouve l'horloge.
3. Préciser les caractéristiques des vecteurs vitesse et accélération de la coccinelle dans le référentiel de la pièce.
Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
Exploitation des lois horaires
Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
15Chute de la tour Eiffel
✔ REA/MATH : Dériver

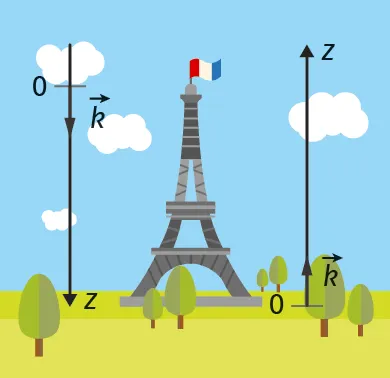
On étudie le mouvement d'un objet lâché depuis le troisième étage de la tour Eiffel, dont l'altitude au cours du temps est décrite par l'équation horaire suivante :
z(t) = - \dfrac{a}{2} \cdot t^2 + h_3
1. Des deux repères représentés sur la photo, identifier celui choisi pour la modélisation de la coordonnée z(t). Justifier.
2. Déterminer la composante du vecteur vitesse v_z(t).
3. En déduire les normes des vitesses de l'objet au moment où il atteint le deuxième étage, puis le premier étage.
4. Déterminer la durée de la chute jusqu'au sol.
2. Déterminer la composante du vecteur vitesse v_z(t).
3. En déduire les normes des vitesses de l'objet au moment où il atteint le deuxième étage, puis le premier étage.
4. Déterminer la durée de la chute jusqu'au sol.
Donnée
- Hauteur du premier étage : h_1 = 58 m
- Hauteur du deuxième étage : h_2 = 116 m
- Hauteur du troisième étage : h_3 = 276 m
- Coefficient : a = 9{,}8 m·s-1
Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
16Mouvement rectiligne accéléré
✔ REA/MATH : Dériver
Un système, assimilé à un point M, se déplace le long d'un axe (\text{O}x), en un mouvement rectiligne. On repère celui-ci par son abscisse x(t) d'équation horaire :
Ici, a = 8{,}0 m·s-2, v_0 = 16 m·s-1 et x_0 = 5{,}0 m.
1. Situer le système à l'instant initial t_0 = 0 s.
x(t) = - \dfrac{a}{2} \cdot t^2 + v_0 \cdot t + x_0
Ici, a = 8{,}0 m·s-2, v_0 = 16 m·s-1 et x_0 = 5{,}0 m.
1. Situer le système à l'instant initial t_0 = 0 s.
2. Exprimer le vecteur vitesse \vec{v}(t) dans le repère (\text{O}\:,\vec{i}) et sa norme v(t) en fonction du temps.
3. Déterminer la date et la position d'arrêt du système.
4. Calculer à quel instant le système passe par l'origine.
3. Déterminer la date et la position d'arrêt du système.
4. Calculer à quel instant le système passe par l'origine.
Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
AExploitation des lois horaires
✔ REA/MATH : Dériver
Le centre de masse d'un solide lancé vers le haut en ligne droite le long d'un axe vertical \text{(Oz)} dirigé vers le haut est repéré par son altitude :
Les coefficients sont égaux à a = 10{,}0 m·s-2, v_0 = 30 m·s-1 et h = 2{,}0 m.
1. Déterminer les conditions initiales du lancer.
z(t) = - \dfrac{a}{2} \cdot t^2 + v_0 \cdot t + h
Les coefficients sont égaux à a = 10{,}0 m·s-2, v_0 = 30 m·s-1 et h = 2{,}0 m.
1. Déterminer les conditions initiales du lancer.
2. Exprimer les vecteurs vitesse et accélération, ainsi que leur norme, dans le repère (\text{O}, \ \overrightarrow{k}).
3. Donner les caractéristiques des vecteurs position, vitesse et accélération au sommet \text{S} de la trajectoire.
4. Quelle vitesse atteint le système lorsqu'il touche le sol ?
3. Donner les caractéristiques des vecteurs position, vitesse et accélération au sommet \text{S} de la trajectoire.
4. Quelle vitesse atteint le système lorsqu'il touche le sol ?
Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
Une notion, trois exercicesDifférenciation
Savoir-faire : Savoir définir et exploiter les vecteurs vitesse et accélération
Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
17Mouvement rectiligne uniforme
✔ REA/MATH : Dériver
Un point mobile \text{M} est suivi par enregistrement dans un repère (\text{O}\:\vec{i}\:,\vec{j}). La modélisation de son mouvement fournit les équations horaires suivantes : x(t) = - v_0 \cdot t + x_0 et y(t) = y_0 avec v_0 = 8 m·s-1, x_0 = 4 m et y_0 = 1 m.
1. Exprimer les coordonnées du vecteur position initiale.
1. Exprimer les coordonnées du vecteur position initiale.
2. Exprimer les coordonnées du vecteur vitesse et caractériser le mouvement.
3. Calculer la vitesse \text{} en (-12 m ; 1 m).
3. Calculer la vitesse \text{} en (-12 m ; 1 m).
Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
18Mouvement parabolique
✔ REA/MATH : Dériver

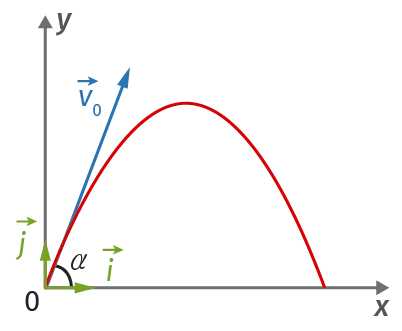
Un point \text{M} adoptant une trajectoire parabolique admet comme équations horaires :
x(t) = v_{0x} \cdot t et y(t) = - \dfrac{a_y}{2} \cdot t^2 + v_{0y} \cdot t avec v_{0x} = 15{,}3 m·s-1, a_y =9{,}81 m·s-2 et v_{0y} = 12{,}9 m·s‑1.
1. Exprimer les coordonnées du vecteur vitesse.
2. Montrer que la vitesse initiale du point \text{M} vaut v_0 = 20{,}0 m·s-1.
3. En déduire l'angle \alpha formé par le vecteur vitesse initiale \vec{v_0} avec l'axe horizontal.
2. Montrer que la vitesse initiale du point \text{M} vaut v_0 = 20{,}0 m·s-1.
3. En déduire l'angle \alpha formé par le vecteur vitesse initiale \vec{v_0} avec l'axe horizontal.
Données
- Expression de la tangente de l'angle \alpha : \tan(\alpha) = \dfrac{v_{0y}}{v_{0x}}
Ressource affichée de l'autre côté.
Faites défiler pour voir la suite.
Faites défiler pour voir la suite.
19Mouvement circulaire
✔ REA/MATH : Dériver
Un point \text{M} décrit une trajectoire dont les équations horaires de position sont x(t) = R \cdot \cos(\omega \cdot t) et y(t) = R \cdot \sin(\omega \cdot t) avec R = 2 m, \omega = 5 rad·s-1.
1. Montrer que la trajectoire est circulaire.
1. Montrer que la trajectoire est circulaire.
2. Déterminer les caractéristiques du vecteur vitesse à t = 0s.
Données
- Équation d'un cercle de centre \text{O} (0 m ; 0 m) : x^2 + y^2 = R^2
- Dérivées usuelles : \cos(u)' = -u' \cdot \sin(u) et \sin(v)' = v' \cdot \cos(v)
Une erreur sur la page ? Une idée à proposer ?
Nos manuels sont collaboratifs, n'hésitez pas à nous en faire part.
j'ai une idée !
Oups, une coquille
